Meccanica Applicata e Robotica Industriale |
Caratterizzazione del comportamento dinamico di dispositivi per moto intermittente |
Dynamic characterization of indexing devices |
| In vista di una ottimizzazione dinamica di intermittori industriali, sono state investigate le cause dello scostamento della legge di moto reale da quella nominale. Lo sviluppo di un modello dinamico appropriato e di uno specifico software di simulazione nonché una campagna di prove sperimentali hanno permesso lindividuazione delle cause di vibrazione e di pianificarne la loro eliminazione. | In order to optimize the dynamic behavior of indexing cam mechanisms, the main causes are investigated, which determine the deviation of the effective motion profile from the nominal one. By formulating a suitable dynamic model of these mechanisms and developing a particular simulation software it was possible to identify the origin of the mechanical vibrations and to plan their elimination. |
|
|
|
|
| HOME |
Progettazione e realizzazione di architetture robotiche innovative |
Design of new robot typologies | ||||||
|
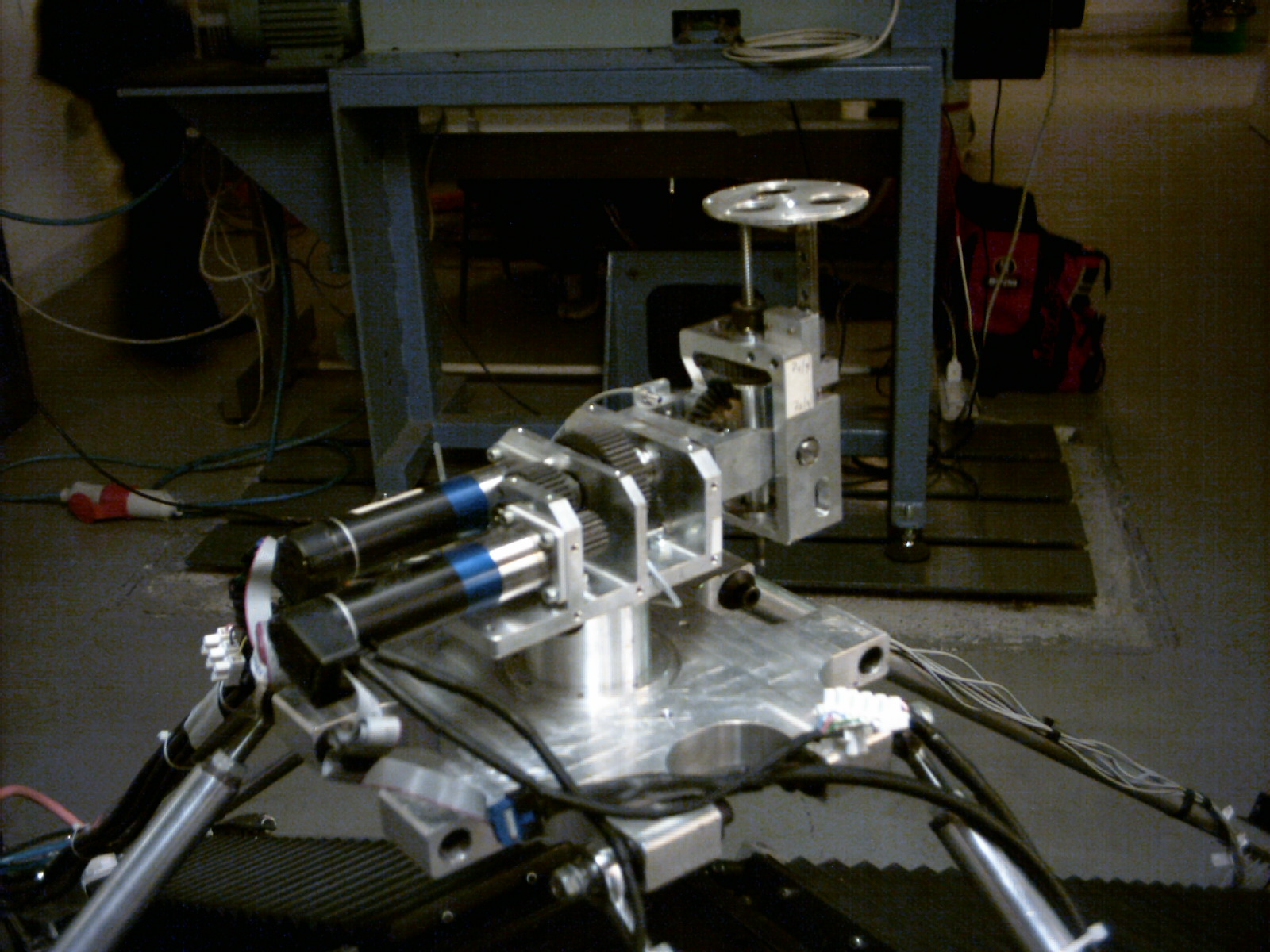
"CHEOPE" - Manipolatore ibrido parallelo-seriale ad alte prestazioni. Dati approssimativi: accelerazione 5g (50 m/s^2), vel 2.5 m/s, ripetibilità 0.05mm, carico continuativo 240 N, di picco 800N.
Parte seriale 2 rotazioni, una traslazione.
|
"CHEOPE" -
Hybrid parallel-serial redundant manipulator with high
performances.
Approximate values: acceleration 5g (50 m/s^2), velocity 2.5 m/s, repeatability 0.05mm, pay load 240 N in continue, 800 N peak.
Serial unit 2 rotations, 1 translation.
| ||||||
|
| |||||||
|
Occorre scaricare ed eseguire il Codecs Installation Package per la propria versione di MS MediaPlayer. Per sapere la versione del proprio Media Player basta cliccare su "?" nel menu del player e quindi su "Informazioni su Windows media Player". I filmati sono codificati in "mpg4 V3". Per vedere i decompressori già presenti sul proprio sistema occorre andare su: Impostazioni, Pannello di Controllo, Suoni e periferiche Audio, Hardware, Codecs Video. | |||||||
| Altri progetti
Il filone di ricerca prevede lo sviluppo di sistemi attuatori dotati
di prestazioni superiori a quelle degli attuali dispositivi
commerciali. Fra i sistemi realizzati si segnalano un dispositivo
monoasse veloce ad elevata precisione (velocità massima 10 m/s,
precisione di posizionamento: 5 µm) ed un robot di tipologia
SCARA, realizzato in fibra di carbonio, con velocità nominale
massima 8 m/s, precisione di posizionamento 0.01 mm. |
Other projects New mechanical actuators are designed having
better performances in comparison with current commercial devices.
Among the others we mention an high-speed monoaxis system (max.
velocity 10 m/s, positioning precision 5 µm) and a modified SCARA
robot endowed with carbon fiber links, having a maximum nominal
velocity of 8 m/s and a positioning precision of 0.01 mm. | ||||||
 |
 |
 | |
| HOME |
Procedure software per lanalisi cinematica e dinamica |
Software procedures for kinematic and dynamic analysis |
| Fra le numerose procedure realizzate, si segnala il programma MECAD
(MEchanism Computer Aided Design) per lo studio cinematico e dinamico di
macchine e sistemi articolati piani a più gradi di libertà, che integra
anche un modulo per la profilatura di camme piane. Caratteristica fondamentale del software è lestrema semplicità con la quale si definiscono la geometria del meccanismo, le leggi di moto degli attuatori e la loro fasatura. Ulteriori studi di cinematica e dinamica hanno permesso lo sviluppo di tecniche originali di simulazione cinematica e dinamica di sistemi spaziali e robot industriali (libreria SPACELIB). |
Among the numerous software developed, we
mention MECAD (MEchanism Computer Aided Design) a program for kinematic
and dynamic analysis of machines and multi DOF planar mechanisms which
also include a module for cams profiling. Main feature of this software is a user friendly interface, which allows the designer to define the mechanism geometry, the motion laws of the actuators and their phase relationships in a very simple way. Further studies on Kinematics and Dynamics have leaded to original techniques and software for kinematic and dynamic simulation of 3D multi-body systems and industrial robots (library SPACELIB). |
| Clicca per sacricare demo e Software Libero | Click here to download demo and free software |
 |
 |
| HOME |
Contornatura e sbavatura con controllo di forza di oggetti di forma non conosciuta |
Automatic contour tracking and deburring with force control of unknown shape objects |
| Grazie ad un sensore di forza ed allo sviluppo di avanzati algoritmi di controllo, è stato possibile programmare un robot SCARA, affinché contorni con continuità un oggetto di forma ad esso non nota, rilevandone il profilo, e permettendo l'esecuzione di lavorazioni superficiali. | Using a force sensor and original advanced control algorithms a SCARA robot has been programmed for tracking the profile of an object whose shape is not known by the robot, in order to carry out particular operations on the border surface |
 |
| HOME |
Calibrazione di robot industriali |
Industrial robots calibration |
| L'accuratezza di posizionamento di un robot industriale viene aumentata compensando i suoi errori geometrici. La calibrazione avviene chiedendo al robot lesecuzione di alcune movimentazioni, misurando l'effettiva posizione della pinza ed analizzando le differenze tra i valori di posizione teorici e quelli effettivi. | The positioning accuracy of an industrial robot is improved by compensating for its geometrical errors. The calibration procedure is carried out by executing some movements of the robot arms, by measuring the actual position of the gripper and by analyzing the differences between theoretical and actual position values |
 |
 |
| HOME |
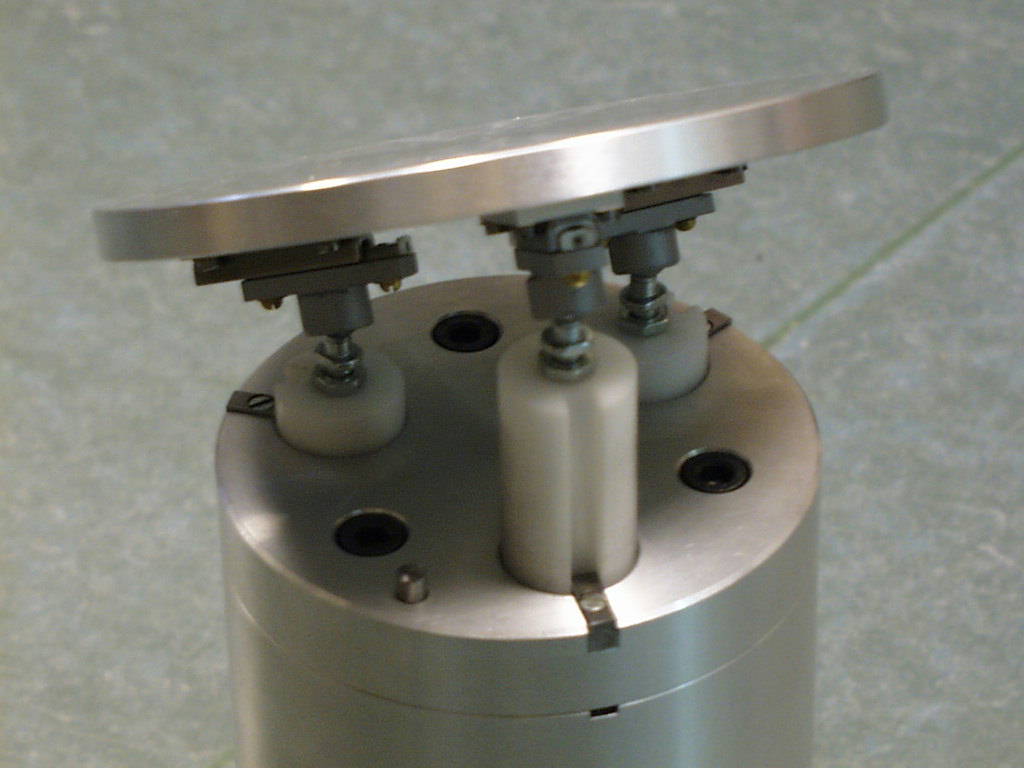
Sistema accelerometrico per indagini biomeccaniche sul comportamento dellapparato vestibolare. |
Accelerometric system for biomechanical investigation on the vestibular apparatus |
| Lo studio, in collaborazione con ricercatori del Politecnico di Milano, dell'Università di Bergamo e dell'O.R.L. Clinica Città di Brescia, ha permesso la realizzazione di un sistema di misura accurato, con procedura di autotaratura, che permette di rilevare le accelerazioni dellapparato vestibolare. Lo strumento è utilizzato per indagini cliniche relative all'equilibrio e per analisi del movimento durante diverse attività umane. | This study, developed in cooperation with Politecnico di Milano, Università di Bergamo and O.R.L. "Città di Brescia" Clinic, has allowed the implementation of an accurate measuring system, having a self-tuning procedure, which is able to collect the accelerations of the vestibular apparatus. The device is used for clinic investigations about the equilibrium and for the analysis of the human motion during various activities |
 |
| HOME |
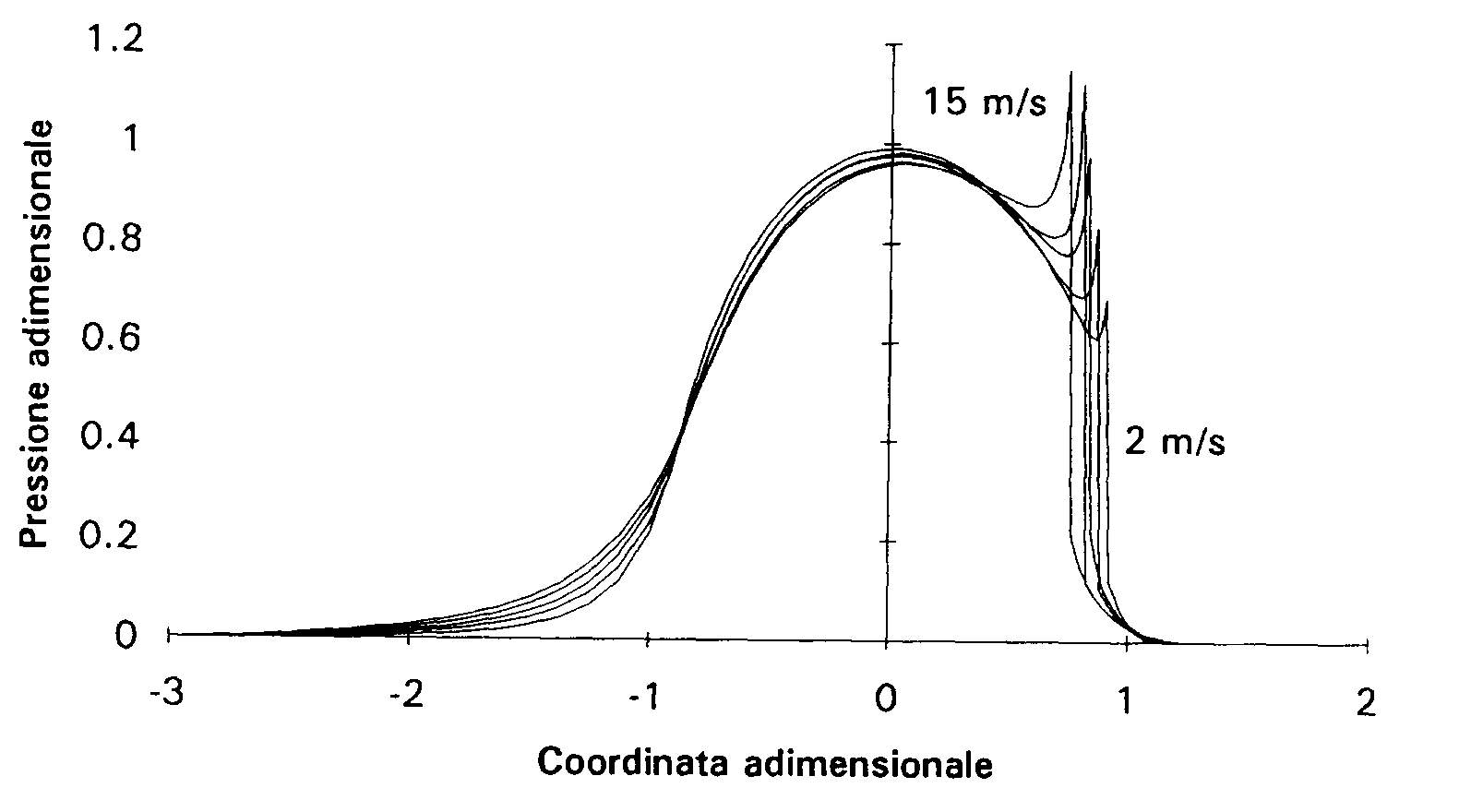
Software per lo studio della lubrificazione elastoidrodinamica |
Software for the study of elastohydrodynamic lubrication |
| Nellambito di studi sulla lubrificazione di organi meccanici è stato realizzato un software avanzato che calcola la distribuzione di pressione e l'andamento del meato in condizioni di esercizio considerando fenomeni dinamici di avvicinamento e allontanamento delle superfici, di slittamento, di comportamento non newtoniano del fluido lubrificante, di regime non isotermico, nonché di rugosità e difetti superficiali. | An advanced software has been developed for studying the lubrication of mechanical components. It calculates the pressure distribution and the film thickness considering the effect of such variables and conditions as squeeze and sliding motion, non newtonian properties of the lubricant, non isothermic conditions, roughness and imperfections of the surfaces |
 |
| HOME |